
IAP: The Class Edition by Snively '11
I'm back in class
{kind=link}
Well, my two weeks of no IAP agenda have come to a close and I’ve started my class.
If you’re a mechanical engineer, attend MIT, and are a sophomore, IAP means only one thing: 2.670, a class called “Mechanical Engineering Tools.” 2.670’s job is to get students familiar with the tools and machinery in the main MechE shop, the Pappalardo lab. Inside are all sorts of mills, lathes, pipe benders, band saws, belt sanders, grinding wheels, and anything else you might need.
While a lot of people who decide to be mechanical engineers love the math and physics behind it all, not everybody has had the chance to work with the actual machinery involved in manufacturing things. Not every high school has FIRST robotics, not every kid has power tools in their garage at home, and even for those that have worked with shop tools, a refresher never hurts.
Next semester is 2.007, the most famous robotics class at MIT, and 2.670 exists almost solely to introduce students to the tools they’ll be using for 2.007.
Today was my third day of class and I thought I’d show you a bit of what I’ve been up to. Keep in mind, there are about 50 people in my section of the class, so some of the processes have been streamlined for time efficiency’s sake (less individual time on machines, more prefabrication on the part of the staff, less time-consuming work on the students’ part).
First, the project. In years past it’s been customary for students in 2.670 to build stirling engines. At the end of 2.670 there would be a big competition to see whose engine ran the fastest.
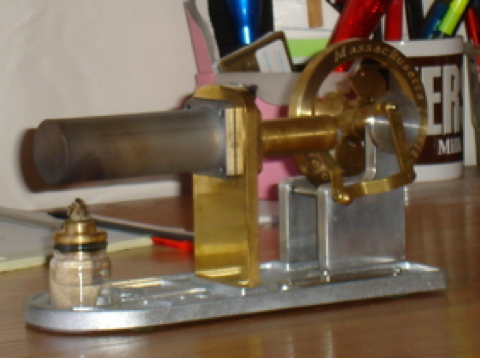
This year there is a new professor for the course, Professor Frey, so the project has been changed. This year we’re using compressed air, some solenoids, and various other bits and pieces to create pneumatic bug things.
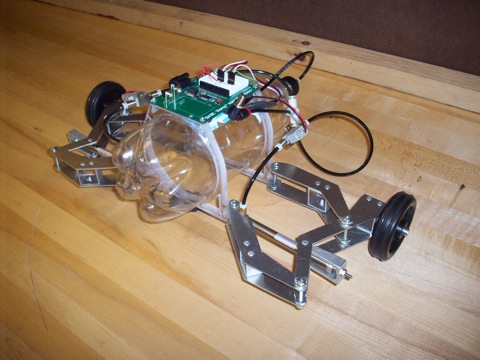
The wheels only roll in one direction, so the mechanics behind walking involve a solenoid opening a valve, the compressed air pushing a leg forward (the wheel rolls) and then another valve pulling the leg back (remember, the wheel only rolls one direction so the robot is pulled forward as the leg is pulled back). Repeat for the other side, and you have an awkward little bug crawling around the ground.
Day 1 of class was spent working with electronics. Each of us were given a Parallax BASIC stamp board and some software and we farted around with a 7-segment display and some LEDs. Ta-da! (Oh, all photos in this entry are courtesy of my Mac’s webcam since I was too lazy to use a real camera)
We also received a bag full of all sorts of other free goodies. Included was this nifty little multi-meter
and a tool set

along with some safety glasses (which I didn’t take a picture of, sorry).
The next day was spent in a machine shop, punching some metal plates, drilling some polycarb, riveting, and drilling into some plastic (other than the polycarb). At the end of it I had two of these polycarb collars (with freshly drilled holes)

and some of the mechanics for the bug legs (complete with rivets and rounded edges)


Oh, and while I was taking pictures I snapped one of myself just for good measure.

Today, day three, was spent working with electronics again. We learned about potentiometers and messed with radio controlling some things. By the end of it my partner (Andrea ’11) and I had rigged a little 7 segment display to read from 0 (joystick on the far left) to 9 (joystick on the far right) and also display each number sequentially moving the stick from left to right. The left joystick controlled the decimal point. We also wrote a little program that spelled the word “HELL” as we moved the joystick from left to right (MIT has several synonyms, one of them is “hell,” which was the easiest to spell on a 7 segment display).
Tomorrow is some lathe-work, where I’ll be turning my wheels. Next week starts with some more electronics, then we assemble the robot, and then finally we code it to walk how we want it to. At the end of the month I’ll try to write a wrap-up entry, but as you may have noticed I’ve been slacking on the blog/Internet front. For everybody who has sent me an e-mail in the last 2 or 3 weeks that I’ve completely ignored, sorry. I’ve kind of taken myself off the grid for IAP. I’ve noticed that the time I usually used for blogging is now being taken up responding to e-mails and moderating the comments of my current entries. As an attempt to combat this, I’ve started aggressively screening e-mails (ie, not answering e-mails that I feel can be answered by just reading the admissions website) and letting comment spam accumulate for several days before batch deleting it. So, if I’ve ignored your e-mail, sorry, but I’m ignoring almost all my e-mails just for my own sanity.
ALSO . . .
Mystery Hunt was AWESOME. I didn’t really get a chance to post any puzzles because there weren’t any data mining tasks as ridiculous as last year, but rest assured, once the puzzles are re-uploaded to the web (the puzzle makers are modifying the website and integrating answers) I’ll do a full wrap-up to compliment Yan’s. We were on different teams with different stories, and believe me, at over 60 hours long, there’s plenty of Mystery Hunt to go around. I did, however, save one of the puzzles to my computer if you want to give it a go. I’ll let you know the correct answer later.
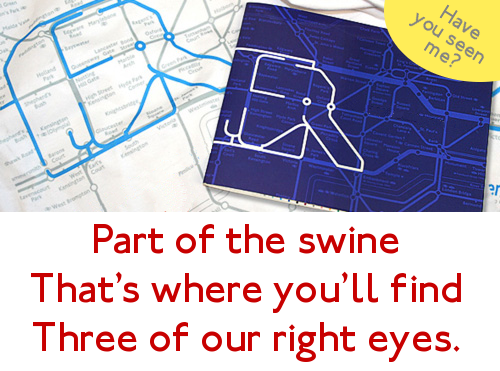
The title of the puzzle is “Friends in Noble England” and it consisted entirely of this picture:
Make sure to watch Attack of the Show on G4 tomorrow, they’re doing a feature on Mystery Hunt this year (their cameras and crew were there for kickoff, you should be able to see how insane it was, but on national television, which makes it a million times cooler).
Oh, and Karen, as far as hamsters go, here’s a pic so that I don’t have to stfu. Besides, everybody knows, with my mouth that’d be almost impossible.
“MIT has several synonyms, one of them is ‘hell'”
haha
that reminds me of the drinking song
Did they give you the materials and tools to take home?
That would be so cool.
MIT rocks, even if you see it as ‘hell’ on somelevel.
Anyways love blog.
I lol’ed at your t-shirt!! The classes sounds awesome, espeically building stuff. If I go to MIT, I hope I could learn to build cool stuff.
Bummer that IAP is over.
Sounded like so much fun.
Two questions:
1. What were some of the other synonyms used to describe MIT?
2.Do you have a more blown up version of the “Friends in Noble England” puzzle? It’s kinda hard to see what’s in the background.
Snively, you are attractive. That is all.
Oh my.
Actually Kevin, from what I understood from Snively, his been lazing off for 2 weeks of IAP, and has started to take a supplementary IAP course (2.670).
I get really happy when you guys post a new blog post, you and Yan make an amazing combination, great photos of food, and the endeavors of a gadget loving MITitan, what more can any living person ask for ?
@Kevin S.L.
Unfortunately, that is the exact size we were given. Good luck! Also, like Mina said, it’s still IAP, I’m just taking a two week class on the back half of it.
omg Snively,
I’m building a Stirling engine for my senior project! Mine will look a little bit different though.
Am I on the right track (no pun intended) if I think the answer is “CH-E-W”?
@Michelle
Reasoning?
@Anonymous with the senior project
Thank you for your subtlety, it was very much appreciated.
@Abdallah
Yep, we get to keep the tools, glasses, electronics, and multimeter.
Nice tee!
Robotics is amazing, really that stuff is amazing.
The video made me watch it a zillion times! Its just freaking cool!
And the T-shirt too! Where’id ya get that from!?
Hi Snively. I have a doubt that’s not related to MIT or the pen. How is your last name (if it is) or your name pronounced? I keep pronouncing it sniff(as in sniffing)-ly(lively,happily,etc.). If that is not how you are supposed to say it, can you en light me please :D.
@Snively
I know you said you’re really busy, but could you take a quick minute to check your email for an email I sent you on Jan. 20? I’d really appreciate it if you did. Thanks! & keep blogging!
http://www.DidIGetIntoMIT.com/
@Orims(’14?)
Check here
@Brandon
Unfortunately I can’t advertise personal websites in my entries. Go ahead and promote where you can, but it will have to stay in the comments of the MIT blogs.
Wow, thank you for the quick response
you wore the same tshirt two days in a row?
Well, I figured out what it was map of, and found the highlighted pattern… it’s a start, not sure what to do with it though
If you are interested, here’s the solution to the elephant puzzle. The answers are all up now, blog entry should be up by the end of the weekend.
http://www.mit.edu/~puzzle/09/puzzles/friends_in_noble_england/SOLUTION/
@Snively
I went on a hunch that “three of our right eyes” may be a hint for the London Eye. The maps are for the London subway system after all.
Looking at the London Eye website, I saw that there are 4 subway stations that are closest to it: Charing Cross, Embankment, Waterloo and Westminster.
Only three of those are a part of the ‘swine’ drawing, on the tip of it’s… nose? trunk? On its right side, anyway…
So, putting the first syllables of the names of the three stations gave me “CH-E-W”, which is a real word, so hey, worth a try.
I’m probably way off XD
IAP sounds awesome. Robotics is cool.
Is the answer kings
Cross?
Hmm. I thought about it, and if I was totally wrong on the first ‘try’, then maybe I should’ve gone for the ‘noble’ clue rather than the ‘eyes’ clue and looked for the Buckingham Palace or something. Oh, well XD
Never mind. Just noticed Snively’s post.
I saw the swine and thought we were dealing with a three eyed pig.
ps. sorry for the double posts, I was typing on a friends iphone on the bus…
@Snively
Thanks for reading my email!
I’ll do my best to advertise on here, haha.
On December 15 alone my site got 1557 unique visitors. O_O
I’m hoping as march rolls around, people will start to hit the site more and hopefully contribute to the forums.
http://www.DidIGetIntoMIT.com/
haha, i like that one of the manly flavors is pain…
Why doesnt your IAP class design the new Congressional Motors aoutomobile, the Pelosi GTO 2012. Sure you could do better than this.
http://iowahawk.typepad.com/iowahawk/2008/11/lemon.html
Did you wear the t-shirt on purpose?
Hi Snively, and MIT community! I have a question, well 2 questions actually. How far is Hartford, Connecticut, from Boston? And the second question, Is MIT active during Easter vacations? Because I’m planing on visiting the campus (for the first time! :D) during this year’s Easter. Also, the Hartford-Boston distance question was asked because I might be landing at Hartford.
Thank you for your attention
PS: Snively, we have the same earphones! Go BOSE!
PS2: Did you know that the guy that created the BOSE company, Amar Bose, studied at MIT!
Hey, Snively. I have a quick question. I know you’re a course 2 major and own a Macbook. I’ve been researching online which laptop is the best for a course 2 major or any other engineering major, and a lot of people recommend Macbook.
What’s your opinion on using a Macbook with a course 2 major? Does it run the engineering programs well? I’m really considering purchasing one, but want to make sure that it’s efficient in performance.
Thanks. Keep rocking that blogging t-shirt.
tcrlpf xjza ckqtle dvfuxlq
xanax no prescription