Where have I been for so long? by Jessie L. '07
Sorry I haven’t posted in such a long time. You see, I’ve been very hosed this IAP. “But it’s IAP,” you say, “How can you be hosed?” Well, there’s the East Campus housemaster slection committee. And keeping up with what’s going on in the UA. And I’m in the Assassins’ Guild‘s ten-day game. And then there was Mystery Hunt, where I hunted with Project Electric Mayhem. But the biggest time sink of all of these is MASLab, the Mobile Autonomous Systems Laboratory, a six unit class/team robotics competition. I am on an all-5th East team, “All Circuits Groovy”>. I came up with that name after Brian ’08, one of my teammates, said that on the first day of class.
MASLab is staffed entirely by students, who give us periodic lectures in room 35-225. This is a picture from our lecture on system control techniques. As you can see if you look closely, and know about such things, the picture displayed is of a sample finite-state machine.
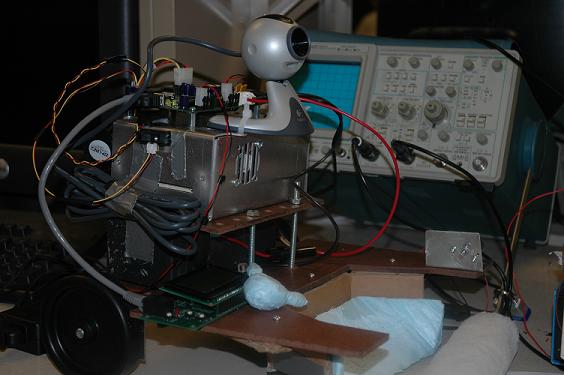
It takes a while for the robots to look like much of anything except a bunch of really nice electronics hacked together. In fact, each team started with a “pegbot”, or a bunch of components that they mounted on a given piece of pegboard. This picture is of our robot, nicknamed SpazBot, in pegboard form. I think Spazbot is trying to read green-and-black barcodes on the sample playing field.

We do much of our work in 38-500, one of the EE labs. Here, Riv ’07 and Andrea ’07, both members of “Robotron”, poke at their robot.

We are helped in the lab by good staff – teaching assistants (TAs) and lab assistants (LAs), most of whom participated in MASLab in previous years. Here, my friend Dave ’06, a supergenius coder who always reads this blog and used to leave me vaguely snarky comments, watches over my teammate Brian ’08’s shoulder to help him debug our software. Hi, Dave! I know you’re reading this! You finally made into an entry!

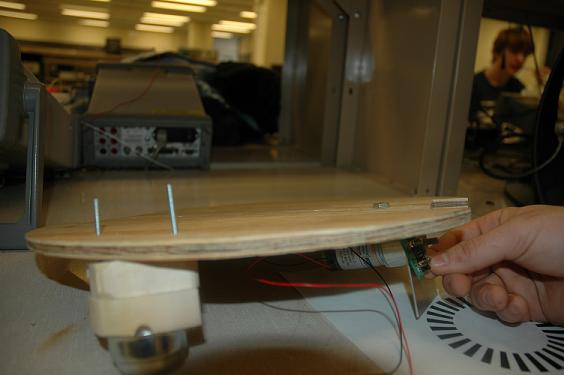
Soon, though, we started needing SpazBot to be something other than a pegbot, so we started building a chassis. I have no mechanical experience, and I got to learn to use lots of tools. I machined most of what’s in this picture – the round base (with help from teammate Matt ’08, who also taught me how to use the necessary tools), the spacers for the caster, and the aluminum mounts for the optical encoders (the little electonic things that someone’s hand is holding).
Matt ’08 also taught Brian and me how to solder, but he is much better at it. Here he is, hard at work soldering.

Our robot is round, but not everyone is using this strategy. One of the non-round robots belongs to Robotron (Kaia ’06, Riv ’07, Andrea ’07 and Nelson ’09). We were asked to babysit Robotron’s robot one afternoon while they got lunch, so I took a picture.
SpazBot (we need to come up with a better name at some point) plans to pick up balls to carry to goals with a “ball gobbler” of two wheels at the front which rotate in opposite directions, snagging balls and pushing them into a queue behind it. Well, if we’re going to be technical and computer science-y, it’s more like a stack than a queue, but “queue” describes the shape. To shoot balls into goals, the wheels reverse direction and spit out the most recent ball to go in. This is a prototype of the ball gobbler.

My camera is broken, so thanks to Ben for lending me one. While learning to use it, I took some cute pictures of Ben and his son.



Each MASLab team keeps a journal. Ours lives here. You can check each day to see what we’ve been doing. The final contest is on February 3, so expect more entries about MASLab!
Awesome entry Jessie! I especially love the pics of Ben and his adorable son. I had a question about starting organizations at MIT. First off, my name is Sloan and I’ve been accepted into MIT’s Class of 2010! I’m really interested in folklore and mythology and kind of wanted to start up a student group to discuss mythology and just kind of as a social networking group to meet people who are interested in the same thing. How easy is it to start organizations and also do you think there would be much interest on campus for such an organization? Thanks and I can’t wait to start at MIT next year!!
I can so totally see Brian saying “all circuits groovy.”
The robot looks awesome, but Ben’s kd is cuter. Haha.
Oh wow do I look terrible there. But yeah, my kid is cute.